
As we pivot toward the era of Software-Defined Vehicles (SDVs), the distinction between "driving" and "being transported" is blurring. At the heart of this transition lies one of the most critical ADAS (Advanced Driver Assistance Systems) features: Adaptive Cruise Control (ACC).
While basic Cruise Control has been a highway staple since the late 1950s, the modern Functionality of Adaptive Cruise Control System is a masterpiece of embedded engineering, sensor fusion, and real-time control theory. For the developers and system architects at Embien, understanding the nuances of the ACC ECU is about engineering the reflexes of the modern car.
The discipline of ADAS advanced driver assistance systems embedded software development forms the backbone of every production ACC program today. From object detection algorithms running on safety-rated microcontrollers to deterministic real-time task scheduling, ADAS advanced driver assistance systems embedded software development spans hardware abstraction, sensor integration, and ISO 26262-compliant software design. The adaptive cruise control feature stack is one of the most demanding applications within this discipline, requiring sensor fusion, predictive control, and fail-safe degradation — all proven deliverables of mature ADAS advanced driver assistance systems embedded software development practice.
The primary need for adaptive cruise control is born from a sobering reality: human error. According to the WHO and various transport authorities, over 90% of road accidents are attributed to human factors — specifically distraction, fatigue, and delayed reaction times.
Recent statistics from the Insurance Institute for Highway Safety (IIHS) indicate that vehicles equipped with front-collision warning and ACC reduce rear-end collisions by nearly 50%. By automating the Stop-and-Go rhythm of highway driving, an Adaptive Cruise Control System mitigates cognitive load, ensuring that even if a driver's attention wavers for a split second, the machine's electronic eye does not.
Unlike its predecessor, which merely maintained a set throttle position, the Functionality of Adaptive Cruise Control System involves a continuous feedback loop. It must solve a dynamic distance-time equation in real-time.
The core logic of an ACC system operates on three primary variables:
The ACC system utilizes a Proportional-Integral-Derivative (PID) control loop or Model Predictive Control (MPC) to adjust the acceleration and braking commands. The goal is to maintain the distance D such that:
D = Dmin + (Vego · Tgap)
where Dmin is the standstill safety margin and Tgap is the user-defined time headway.
To achieve a robust Adaptive Cruise Control System, a single sensor is rarely enough. Developers today rely on a combination of technologies, each filling the blind spots of the other:
We have moved through three distinct generations of ACC:
Designing an ECU for adaptive cruise control requires a balance between high-performance computing and automotive-grade reliability.
The Microcontroller Unit (MCU/SoC)
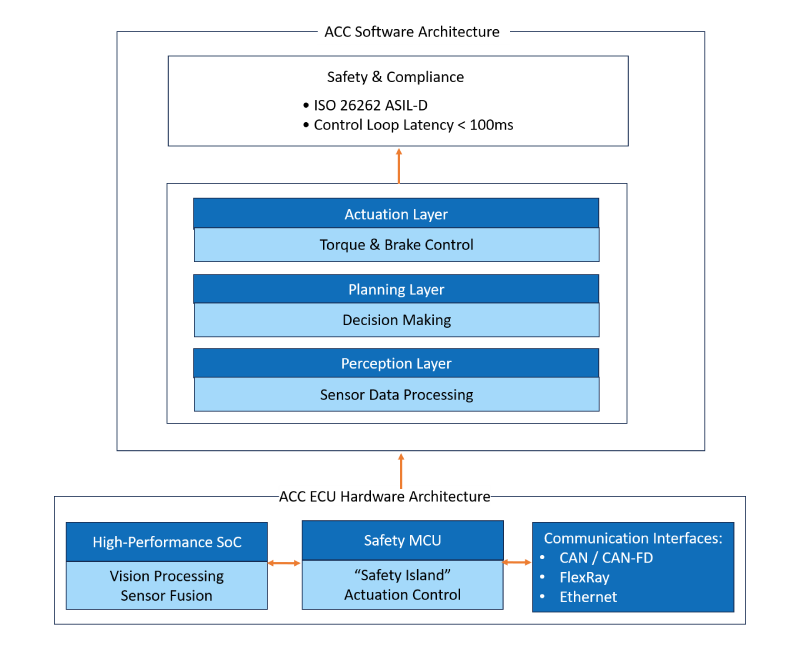
For ASIL-D compliance (the highest level of functional safety), we typically see heterogeneous architectures. A high-performance SoC (like the NXP S32G or Renesas R-Car) handles the vision processing and sensor fusion, while a Safety Island or a secondary locked-step MCU handles the final actuation commands.
Communication Interfaces
The ACC module does not act in isolation. It communicates via:
The software stack for an Adaptive Cruise Control System is typically built on AUTOSAR (AUTomotive Open System ARchitecture), ensuring modularity and scalability. This is a prime example of structured ADAS advanced driver assistance systems embedded software development applied at scale.
Regulatory Compliance & Latency: Because ACC is a safety-critical function, it must adhere to ISO 26262. The Control Loop Latency — the time from the sensor detecting a lead vehicle's brake light to the ego vehicle applying brakes — must be deterministic and typically under 100 ms. Any jitter in task scheduling could result in a failure of the system's ability to maintain a safe gap.
Deploying effective ADAS solutions for adaptive cruise control requires confronting a series of real-world edge cases:
ADAS Visualization translates the real-time decisions of adaptive cruise control into clear, actionable information for the driver. Effective ADAS Visualization for ACC displays the detected lead vehicle, current following gap, set speed, and system status — all rendered on the digital cluster with latencies under 50 ms to match the control loop cadence. As ACC transitions toward higher autonomy levels, ADAS Visualization must also communicate the system's confidence level and any take-over requests, using progressive visual and haptic cues that comply with ISO 15008 and UNECE R79 HMI guidelines.
The Functionality of Adaptive Cruise Control System is no longer a luxury — it is a foundational block for the autonomous future. However, building these systems requires deep expertise in embedded hardware, complex algorithm development, and rigorous functional safety standards.
At Embien Technologies, we specialize in the full lifecycle of Automotive ECU development and automotive digital transformation services. From designing lightweight AI models for affective driver state estimation to developing high-integrity ADAS modules like ACC, our Engineered in India philosophy ensures global standards of safety and efficiency. Whether you are looking for custom middleware development, ISO 26262 compliant software stacks, multi-modal sensor fusion solutions, or end-to-end ADAS advanced driver assistance systems embedded software development, Embien is your partner in navigating the complexities of modern mobility.

Embien’s Product Engineering Services enable intelligent adaptive cruise control systems with real-time sensor integration, reliable vehicle communication, and scalable embedded automotive architectures.

Embien’s Automotive Engineering Services enable intelligent adaptive cruise control systems with real-time sensor fusion, reliable vehicle communication, and advanced driver assistance integration.

“A case study on integrated connectivity clusters demonstrating seamless mobile application support, real-time vehicle connectivity, and advanced embedded automotive integration.