
When a vehicle accelerates on a slippery surface, wet tarmac, ice, loose gravel, the driven wheels can spin faster than the vehicle is actually moving. This wheel slip condition reduces the tyre's ability to generate lateral force, making the vehicle difficult to steer and potentially causing a loss of directional control. On rear-wheel-drive vehicles, uncontrolled wheel spin can induce oversteer; on front-wheel-drive vehicles it destroys steering authority entirely.
The Traction Control System exists to prevent this. By detecting driven wheel slip in real time and intervening through engine torque reduction and selective brake application, TCS keeps wheel slip within a range where the tyre can still generate the lateral forces needed for steering and stability, even on surfaces where an unassisted driver would struggle to maintain control.
TCS is one of the foundational active safety systems in modern vehicles, sharing sensors and actuators with ABS and Electronic Stability Control (ESC) and operating as an integral part of the chassis control ecosystem. In most modern implementations TCS is not a standalone ECU, it is a software function residing within the ESC/VDC (Vehicle Dynamics Control) ECU. Understanding its architecture, control logic, and integration requirements is essential for anyone working on chassis domain electronics.
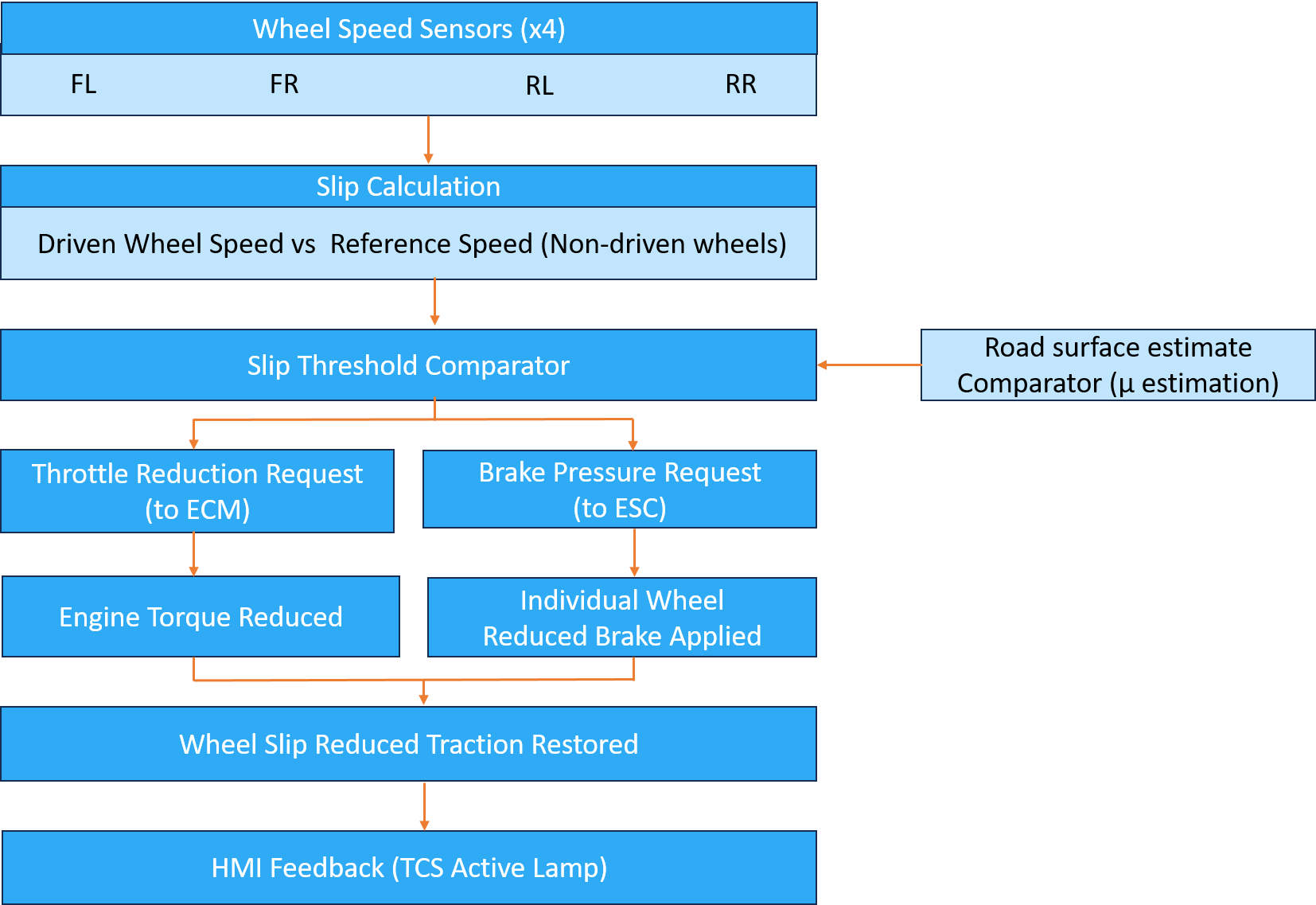
The TCS ECU's core function is to detect driven wheel slip and apply corrective interventions to restore traction, without requiring driver input and without creating a secondary hazard through excessive or poorly timed braking.
Key Inputs:
Key Outputs:
| Mode | Description |
|---|---|
| Monitoring | All wheels within slip threshold - no intervention |
| Throttle Intervention | Mild slip detected — engine torque reduced first |
| Brake Intervention | Significant slip - individual wheel brake applied |
| Combined Intervention | Severe slip - both throttle reduction and brake applied |
| Sport / Off Mode | Driver-selected - slip threshold raised or TCS disabled |
| Fault / Degraded | Sensor fault detected - TCS standby, ABS retained |
Governing Standards: ISO 26262 applies - TCS functions that share the brake actuation path with ABS are typically rated ASIL C. UN Regulation No. 13 (heavy vehicles) and FMVSS 126 (US passenger vehicles) govern stability control system requirements that encompass TCS. Euro NCAP's active safety assessments evaluate TCS performance as part of the broader stability control scoring.
Microcontroller
Since TCS in modern vehicles is integrated within the ESC ECU, the hardware platform is shared. The Infineon AURIX TC3xx family and NXP S32K3 series are the dominant choices. Both provide the lockstep dual-core architecture required for ASIL C/D safety goals, integrated FlexRay and CAN FD controllers, and dedicated motor control peripherals for driving the hydraulic control unit solenoids.
Clock speeds of 200–300 MHz are sufficient for the TCS control algorithms, which are computationally lighter than ADAS fusion tasks but require deterministic execution within a 10 ms control cycle. The MCU must handle simultaneous wheel speed signal processing, slip calculation, PID control output, and CAN communication within this cycle budget without jitter.
Memory
Flash: 4–8 MB for TCS/ABS/ESC combined program code. Calibration data, slip thresholds per road surface type, PID gain tables, torque reduction maps, occupies a dedicated calibration partition
RAM: 512 KB – 1 MB for real-time control variables, wheel speed buffers, and fault management state
Data Flash: DTC storage, adaptation values, and end-of-line calibration results
Communication Interfaces
CAN FD (primary): Engine torque requests to ECM, brake pressure coordination with ESC HCU, status to cluster. High-priority messages, torque reduction requests, are allocated the shortest CAN arbitration IDs to minimise bus latency
LIN: Interface to wheel speed sensor modules in some implementations where smart sensors provide pre-processed speed data
FlexRay (legacy platforms): Used on older chassis domain buses, being replaced by Automotive Ethernet on new platforms
Private SPI: Interface to the ESC hydraulic control unit's solenoid driver IC
Sensing Interfaces
Wheel speed sensors are the most critical input. Modern implementations use active magnetoresistive (MR) sensors, replacing older passive inductive sensors, which provide a digital pulse train output, accurate down to near-zero vehicle speed, and include built-in diagnostics. The ECU processes these pulse trains via dedicated timer capture peripherals (ICU), calculating individual wheel speeds with a resolution of typically 0.1 km/h and an update rate of 5–10 ms per wheel.
Power Supply and Safety Hardware
AUTOSAR Classic - Standard Choice
TCS software runs on AUTOSAR Classic universally in production, the deterministic scheduling, ISO 26262-qualified BSW, and OS memory partitioning are prerequisites for an ASIL C chassis function. The TCS application SWCs share the AUTOSAR OS task structure with ABS and ESC SWCs, all executing within a 10 ms cyclic task at the highest application priority.
Key BSW Modules
| BSW Module | Role in TCS |
|---|---|
| AUTOSAR OS | 10 ms cyclic task for control loop execution |
| ICU Driver | Wheel speed pulse capture and frequency measurement |
| CAN Driver / Com | Engine torque requests, ESC coordination signals |
| SPI Driver | Hydraulic control unit solenoid driver interface |
| WdgManager | Control loop deadline supervision |
| DiagEventManager | DTC management for sensor and actuator faults |
| DCM | UDS diagnostics, DTC readout, live data, EOL routines |
| NvM | Calibration data and DTC storage |
Application Software Components
Wheel Speed Processing SWC: Receives raw pulse capture data from the ICU driver and computes individual wheel speeds in km/h. Applies a low-pass filter to smooth high-frequency noise from road surface irregularities. Detects plausibility errors, a wheel speed sensor reporting physically impossible acceleration rates is flagged as faulty and the corresponding DTC is set.
Reference Speed Estimation SWC: Computes the vehicle reference speed, the best estimate of actual vehicle velocity, from the wheel speed sensor array. On a front-wheel-drive vehicle under TCS intervention, the rear wheels (non-driven) provide the reference. The algorithm accounts for cornering, during a turn, the inner and outer wheels travel different distances, producing a natural speed difference that must not be mistaken for slip.
Slip Calculation and Threshold SWC: Computes the longitudinal slip ratio for each driven wheel:
Slip Ratio = (Driven Wheel Speed - Reference Speed) / Reference Speed
Compares the slip ratio against a calibrated threshold. The threshold is not fixed, it varies with estimated road surface friction (μ). On a dry road, a higher slip ratio is tolerable before intervention is needed; on ice, even small slip ratios require immediate response. The road surface friction estimate is derived from the relationship between brake pressure applied and wheel deceleration rate, a lower deceleration for a given pressure implies a lower friction surface.
Torque Intervention SWC: When slip exceeds the threshold, the first intervention is engine torque reduction. A PID controller computes the required torque reduction to bring slip back within the target range. The torque reduction request is transmitted to the ECM via CAN as a maximum permitted torque value. On spark-ignition engines, the ECM may also retard ignition timing for faster torque reduction than throttle alone can achieve. Torque reduction is the preferred first intervention because it is smooth, imperceptible to the driver in mild cases, and does not generate the mechanical forces that brake intervention introduces.
Brake Intervention SWC: When torque reduction alone is insufficient, typically on very low friction surfaces or during aggressive acceleration, individual wheel brake pressure is applied to the slipping driven wheel. The hydraulic control unit's solenoid valves are commanded via SPI to build pressure in the appropriate brake circuit independently of the master cylinder. A pressure control loop monitors actual solenoid current against target and applies corrections. Brake intervention is pulsed, build, hold, release cycles, to avoid wheel lockup from over-braking, mirroring the ABS pressure cycling logic in reverse.
ESC Coordination SWC: Transmits TCS intervention status to the ESC ECU. When TCS is actively braking a wheel, the ESC must be aware to prevent conflicting brake commands. Conversely, when ESC detects an oversteer or understeer condition, it may request TCS to modify its slip threshold or suspend intervention to allow ESC's corrective strategy to operate unimpeded. This coordination is managed through a defined arbitration protocol on the chassis CAN bus. Embien’s Digital Transformation Services enable modern ECU development with connected, data-driven, and scalable automotive system architectures for advanced control applications.
Fault Management SWC: Monitors all inputs and actuator feedback continuously. Fault responses are graded:
Safety and Compliance Considerations
ASIL Rating: TCS functions sharing the brake actuation path are rated ASIL C, driven by the hazard of unintended brake application at speed (S3, E3, C2). The torque reduction path, which has lower consequence severity, may be rated ASIL B. ASIL decomposition is applied, the ESC ECU's lockstep dual-core architecture provides the two independent channels required.
Key Safety Mechanisms:
ISO 21434 Relevance:The CAN interface for engine torque requests is a credible attack surface, a spoofed maximum torque reduction command at highway speed could cause dangerous deceleration. SecOC authentication on this message is the standard mitigation on connected vehicle platforms.
TCS is increasingly being absorbed into integrated chassis domain controllers alongside ABS, ESC, and active suspension functions. On electric vehicles, the TCS function gains a new dimension, motor torque vectoring allows individual wheel torque to be modulated with far greater speed and precision than hydraulic brake intervention, enabling a smoother and more effective traction control response. This reduces reliance on brake-based TCS intervention significantly.
The shift to brake-by-wire and steer-by-wire architectures in next-generation vehicles will further integrate TCS, ABS, and ESC into unified software-defined chassis control platforms where the distinction between individual systems becomes a software boundary rather than a hardware boundary.
Embien has experience in developing chassis domain ECU software including wheel speed signal processing, CAN FD communication stacks for chassis coordination, and AUTOSAR Classic application SWC development for safety-relevant functions. Our teams have worked with Infineon AURIX and NXP S32K platforms in ASIL C programs and are experienced in the ISO 26262 documentation and verification requirements that chassis safety functions demand. Our RAPIDSEA suite includes production-ready CAN FD stacks that reduce integration effort on chassis ECU programs.
To discuss your TCS, ABS, or ESC ECU development requirements, reach out to the Embien team.

Embien’s expertise across industries enables the development of reliable, safety-critical traction control systems with robust sensing, control, and real-time vehicle dynamics management.

Embien’s Automotive Engineering Services enable the development of high-performance traction control ECUs with robust control algorithms, real-time vehicle dynamics management, and functional safety compliance.

A case study on Android-based UDS client enabling remote diagnostics, DTC management, and secure FOTA updates for vehicle ECUs.